


Waymo’s completely driverless taxi is coming to Los Angeles, and will be open to the public starting this week. We got an advance ride in these self-driving electric cars and got a sense of what this level 4 system can do in one of the more chaotic driving situations in a city full of chaotic driving situations: a Santa Monica and Venice Beach weekend.
Waymo is the self-driving division of Google/Alphabet, founded in 2009, focusing on delivering fully autonomous driverless taxis.
It has been operating self-driving vehicles on public roads in some way or another since 2017, when it started supervised self-driving robotaxi operations around Phoenix, Arizona. At first it used Pacifica Hybrids, and now it’s using Jaguar I-Paces, festooned with all sorts of additional sensor hardware.
As of now, it has expanded its service area in Phoenix and opened driverless taxi service in San Francisco. At this point these efforts are far enough along that it’s even taking fares for rides in both locations.
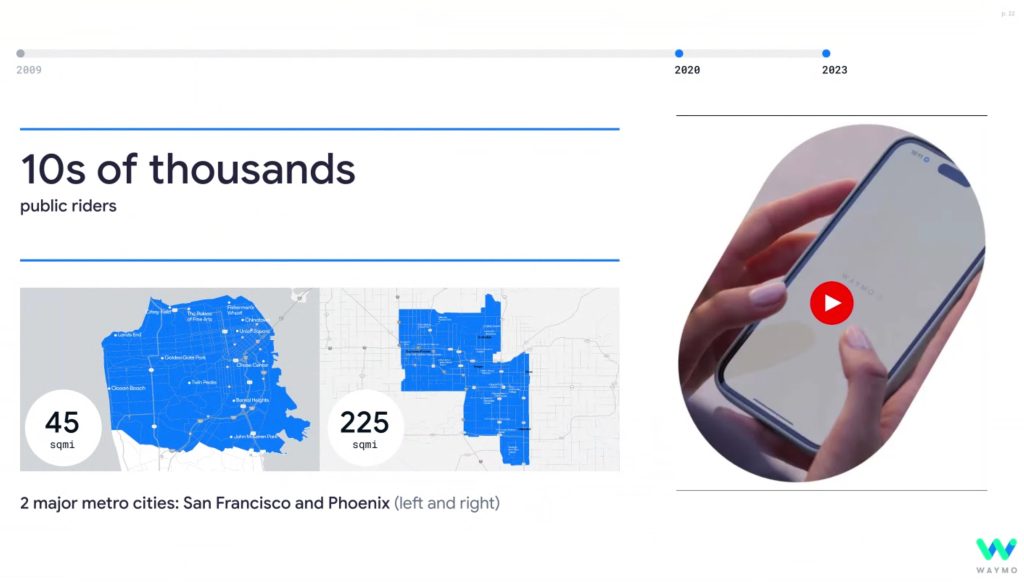
In total, Waymo currently covers about 45 square miles in San Francisco (which is basically the whole city of San Francisco proper – it’s quite a small total area) and 225 square miles in Phoenix, which Waymo says is the largest contiguous autonomous car service area in the world.
In the time it has been operating, it has served “tens of thousands” of public riders according to Waymo.
But it hasn’t been in LA, a city that’s full of electric cars, until now. The cars have been roaming around and testing/mapping the region for months now, but public riders couldn’t hail them. That all changes this week.
How Waymo’s driverless taxi works
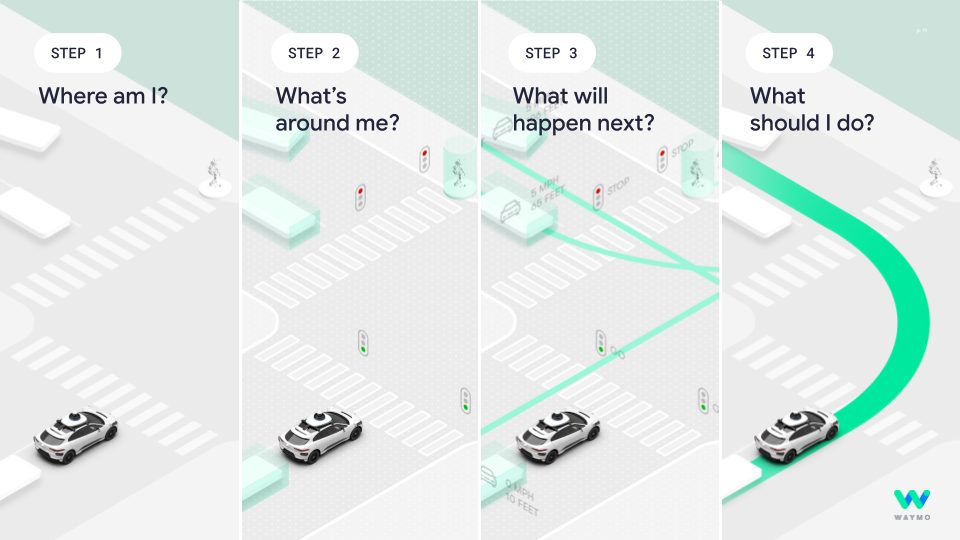
I brought a friend along to help keep eyes on the car and analyze its decisions (and, well, because it was a fun day out), but the car still had us at a disadvantage – our four total eyes are no match for Waymo’s nine cameras, six radars, and five spinning laser detectors (LiDAR). And Waymo’s sensors are positioned at the corners and above the car, giving more viewing angles than a single driver is capable of.

These sensors were all designed and developed by Waymo, as the company says it couldn’t find hardware to meet its needs when it started looking for them.
Waymo says that these sensors combine to keep track of everything going on around the car, including down to identifying different classes of pedestrian (adult, child, wheelchair-users, etc.) and even identifying pedestrian intent (whether one is about to cross the street, for example).
Autonomous drive systems are ranked from level 0-5, describing how much capability the system has. In general, levels 0-2 are primarily human-driven, and levels 3-5 are primarily autonomously driven.
Most manufacturers selling cars today have some sort of driver assistance system that can be categorized as level 2. There is one level 3 system, Mercedes DRIVE PILOT, coming to the US soon (we tested it in Santa Monica last month). This system can take control of the car in certain limited circumstances and legally can be considered the driver, but you still need to be in the driver’s seat as a fallback driver.
But driverless taxi companies like Waymo and GM’s Cruise are level 4. This means that the cars are validated to run all the time with no fallback driver, and nobody in the driver’s seat – though may still be limited to certain areas, conditions or times of day (level 5 will eventually have none of these limitations).
Waymo’s LA tour
In this case, Waymo’s coverage in Los Angeles is currently limited to Santa Monica and Venice Beach, but is operating 24/7 for now within that area:

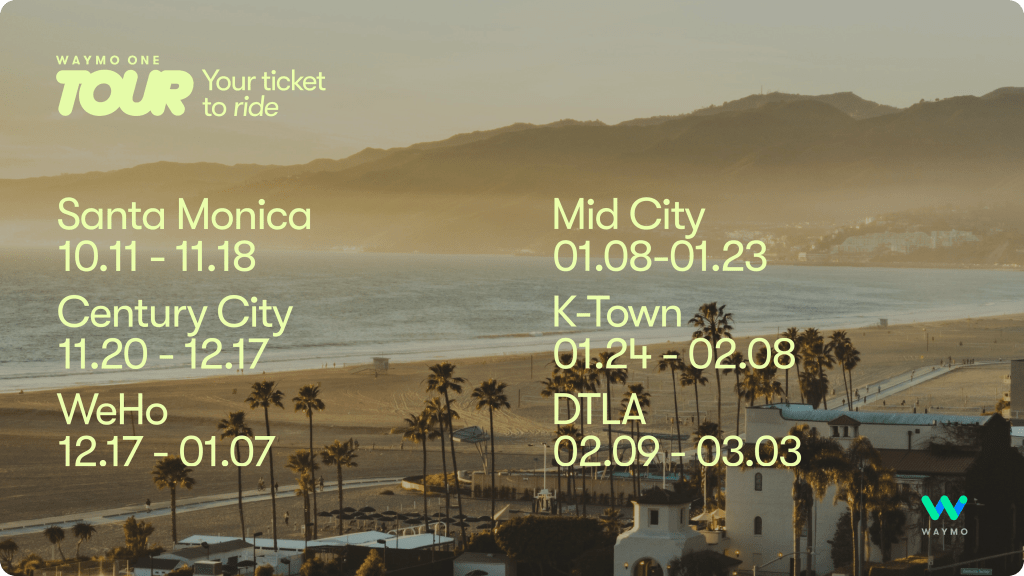
But Waymo is “going on tour” around other parts of Los Angeles in the coming months, and will host pop-up events in various locations where the public can show up to learn about Waymo and get a ticket to use the service for free for a week.
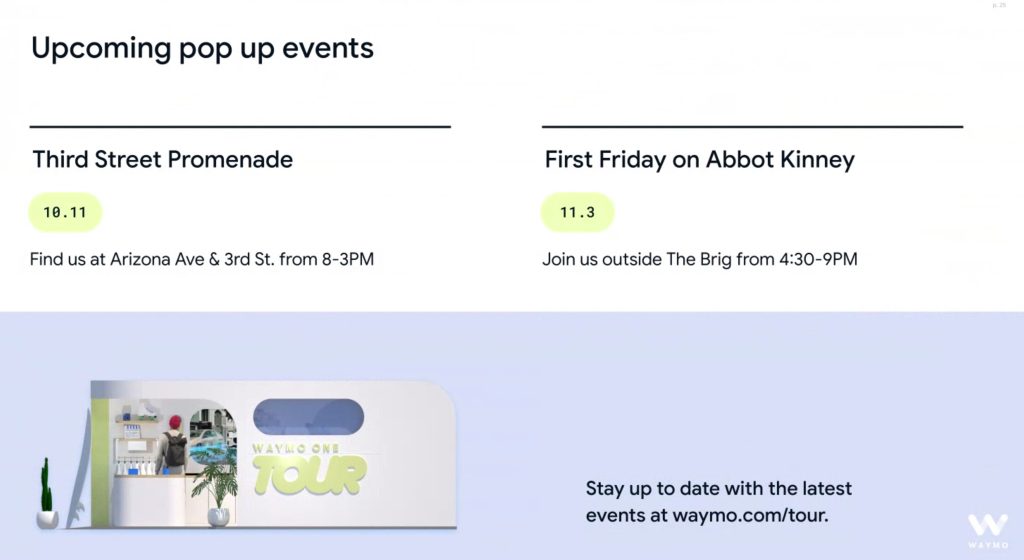
The cars will take riders in Santa Monica until November 18th, and then they’ll hop along to five other locations in LA for about a month each. Pop-up events for Santa Monica/Venice are on October 11th at Third Street Promenade and November 11th on Abbot Kinney. Pop-up events for other parts of town will be announced later:
You can also sign up for the waitlist and hope to get invited when the service comes to your area.
Calling your driverless taxi
To order the car, you use the Waymo One app, which functions almost identically to any other ride-hailing app. Up to four total passengers are allowed – just like with other ride-hailing apps, you can sit in any seat you want, except the driver’s seat.
You select where you want to go and the app automatically picks what it considers a good pickup location nearby. This may be a short walk away from where you selected (in our three pickups and dropoffs, it always was), in which case the app will give you walking directions to where to go. As for pricing, it’s free for now in LA, but Waymo is “evaluating pricing models.” In the past, it has said it will use surge pricing, while Cruise said it will not.
Even though the car decides pickup/dropoff locations, you should still use your human brain and not offload all the decisionmaking to the vehicle (even though that’s literally the entire point of this exercise). We noticed that the car occasionally made odd decisions, like thinking it could pick you up in a place that would be hard to find a spot to pull over in, or behind a pay gate at a public parking lot.
So before calling the cab, try to have a look around and find a good spot to get picked up. And if you know you’re going to a tough dropoff spot, maybe help the car pick a spot that’s a block away or so. And it might be a good idea for Waymo to add a note about this to the onboarding process for new users.
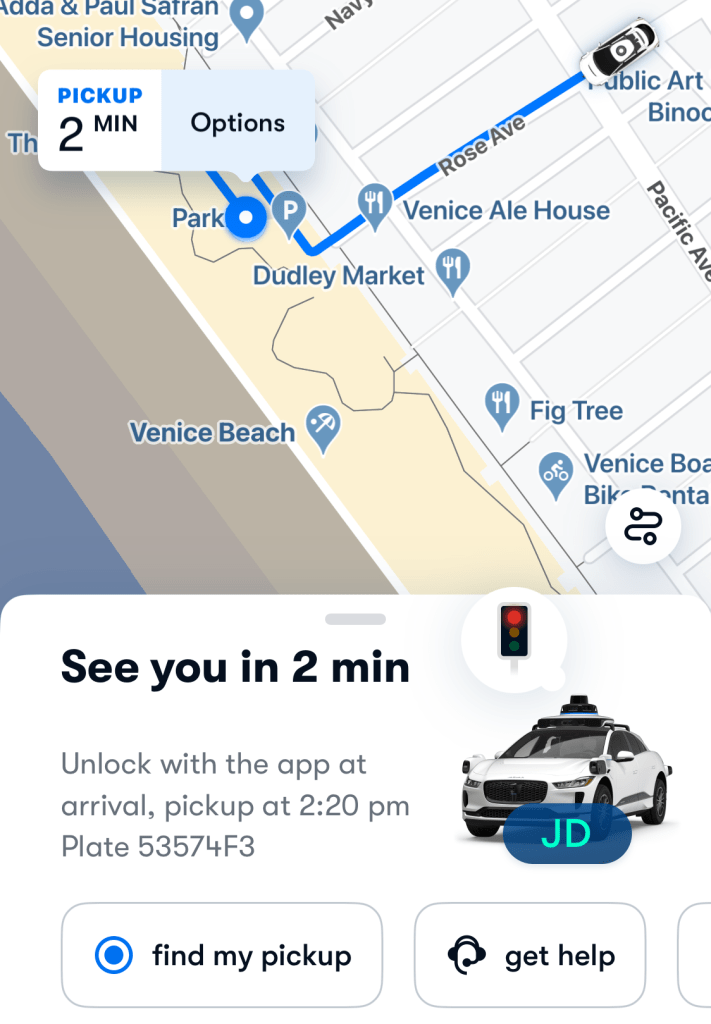
You can track the car on its way to meet you the same way you can in any other ride-hailing app – the only difference from other ride-hailing apps is there’s no live graphic showing roaming cars prior to selecting. Waymo wouldn’t tell us how many cars it has operating in the area (merely saying the tour uses a “limited” number of vehicles for now), but we never had to wait more than a few minutes for a car and we did ride in three different cars on our three trips.
As the car pulls up, you need to have your phone out so you can unlock the car. If you’re having trouble finding your car, or if driverless taxis are so common in the area that you can’t figure out which one is yours, you can set a two-letter monogram in a color of your choice in the app, and your car will be tagged with your monogram. And if you have vision-impairments or just want to have a little fun, you can use the app to honk the car’s horn or play a gentle melody to help you find your chariot.
It even has a pretty substantial trunk, though we didn’t use it. This comes in useful for Waymo’s Phoenix Sky Harbor airport service, and maybe at some point we’ll see the same for LAX (though as far as chaotic airport driving situations go, every Angeleno knows that LAX is world-class terrible, so maybe don’t hold your breath).
Once you’re in the car for the first time, you get a one-minute video giving you basic information of how the system works. Each car has an airline-like informational placard in the seat-back container, and some of the cars we rode helpfully came with wrapped N95 masks and barf bags (perhaps the others were taken as souvenirs… or used).
Then you can play music from the car or from your phone, though the car will only interface with your music through Google’s app ecosystem (I would much rather it be capable of some kind of ad hoc bluetooth pairing without having to download another app, so that audio from other apps, e.g. Apple Podcasts, were usable).
Venice on a weekend: our ride in perfect chaos
With our chance to ride the system early, we decided to give the car a real challenge in one of the most chaotic situations in a city full of chaotic driving situations: Venice Beach on a weekend.
As is the case with many beach communities, Venice Beach can be tough to drive around. There are tons of pedestrians wandering aimlessly, tourists who don’t know the roads and are distracted with the sights, people hunting for parking (or double-parked), generally smaller and older roads, alleyways, one-way streets, bicycles… and sometimes even a person pushing a washing machine on a dolly (yes, the car did recognize this obstruction).


So this was certainly a challenging environment for a driverless taxi, and one which would show off its decisionmaking capabilities (or potential lack thereof?).
Soon after the start of the drive, we witnessed the car’s pedestrian-intent detection in action. It stopped rather abruptly for a pedestrian who, to our human eyes, had not really telegraphed their decision to cross. Personally I think I would have continued through the intersection in this circumstance, since if the car had remained at speed, the pedestrian would have just crossed behind us, and it wasn’t obvious that they wanted to cross in the first place. Nevertheless, I think this was a good decision made by the car.

This suggested to us right off the bat that Google’s algorithm seems to put a premium on being a courteous road user, particularly towards the more vulnerable segments of road users.
We saw this happen again not long after, when pedestrians sauntered across the road against our green light. They saw us coming and stopped to at the median, but the car still slowed down in anticipation and due to their presence near our path (note: in a positive move against car overreliance, jaywalking is no longer ticketable in California, though pedestrians must remain cautious/aware).
As far as other non-car road user interactions go, the car also:


This was all reflected in the in-car display. It’s nice to see reflections of the real world on the screen, to add confidence for passengers that the car isn’t just making it all up as it goes along.
The display is slightly less detailed than other systems, rendering flat squares and circles instead of representations of each tracked object. This looks cleaner and more stable (as opposed to the often-jiggly lines of Tesla FSD), but not quite as bang-pop-wow as seeing tiny trucks and motorcycles properly rendered in a visualization (though we’re guessing washing machines wouldn’t have made the cut for inclusion into rendering).
Getting dropped off in Venice, our driverless taxi was quite hesitant in creeping up to the dropoff point. We noticed the same behavior in each dropoff, while the car did usually pick areas that were good for dropping off (low traffic, wider roads, etc.), it often seemed indecisive for the last 20 feet or so worth of finding a spot to stop.
After a quick walk around, we called another cab, but soon after realized we were standing within a paid parking lot manned by an attendant, which the car would not be able to get to. The car probably would have picked a spot to pull over, but given the gridlock line of cars waiting for the pay lot or to turn down the alley to avoid it, this probably would have caused even more chaos.
So, this is an example of why we should use our human brains and eyes to help ensure good pickup locations, because the map didn’t seem to know about the entry to this parking lot. Luckily, the app lets you adjust your pickup location after calling a cab (though the app did freeze up after we requested adjustment and needed a reboot, but the adjustment was still registered).
But we weren’t able to adjust our destination in the app while the car was in operation – perhaps due to an app bug, because a button does exist to allow adjustments, it just didn’t work for us.
This was related to probably the worst moment of the drive, where our driverless taxi wanted to make an unprotected left from an alleyway into two lanes of gridlock and simply could not find a place to do so. Despite having several options: a “keep clear” section across the way with a second target lane it could have entered, or a right turn, or straight ahead into another alleyway, it wanted to wait for cross traffic to offer lots of space for it to turn left. But that just wasn’t going to happen in weekend beach traffic.


So it waited. Through two traffic light cycles. Until a car pulled up behind us and started honking, then two cars pulled in around us and started honking at the first honking car. Then, the car reached out for help, and “the team” intervened to get things back on track.
Waymo has a “fleet response team” who can respond in situations like this where things get unpredictable. The car still stays in control, but the fleet response can “provide guidance” to the vehicles. Here’s how Waymo described it to us:
Waymo’s fleet response team is like the air traffic control for our fully autonomous cars. Our fully autonomous system is designed to recognize unexpected situations and contact our fleet response team, who can confirm what the car is seeing and provide additional contextual information.
For example, if a Waymo vehicle detects that the road ahead is closed due to construction, it may pull over and request confirmation from our fleet response specialists before taking an alternate route. Our specialists can then confirm that the vehicle correctly perceived the construction zone and communicate the lane closure to the rest of the fleet.
Waymo’s fully autonomous cars are responsible for making every driving decision on the road and do not rely on a human driver, either in the car or remotely.
Input requests from Waymo’s fleet of autonomously driven vehicles are distributed amongst the fleet response team who can provide the Waymo Driver guidance when prompted.
Soon after “the team” chimed in, we took a right turn, which probably would have been the right thing to do to begin with, and then continued through the rest of Venice. Then, just a minute after the worst moment of the trip, we had the best moment.
Our car came up on a diagonal merge into a construction-affected intersection with closed lanes on the right causing traffic to have to merge into oncoming lanes. Behind us, there was a bus parked and a large “tree work ahead” sign obstructing view of traffic coming behind into the lane we were meant to merge into. The car intended to turn left through the half-closed intersection, but there were two stopped vehicles in the way.


So the car pulled out and around the two stopped vehicles into the median left-turn lane, yielded momentarily for oncoming traffic, then turned left into a space in front of an oncoming bus that was definitely enough space to move through, but we also wouldn’t have been surprised if it had waited.
This, I thought, was a particularly clever move in a tough situation, which respected rules and other drivers enough, while still doing what would get us to our destination more quickly than waiting forever for things to clear up. It felt competent, confident and planned. It almost felt human.
But then another tough situation soon followed. I had asked the car to drop us off on Santa Monica Pier, knowing that there is a parking lot on the actual pier itself. The car sagely decided that this was a ridiculous idea, and picked a parking lot just beside the pier, which took a bold move to get to.

But it turned out the parking lot was full, and the arm for the lot was down, and cones were laid out on the street stopping people from turning and getting stuck down there.
As the car pulled up (after momentarily avoiding an oncoming cyclist in our lane), it noticed the cones in front of its desired lot and rerouted to another dropoff spot a few minutes down the way. But then a fellow electric car, a Model X, drove around the cones, and our car wanted to be with its zero emission friend so it followed the cardinal rule of parking: if other people are going there, it must be fine, right?
So it re-re-routed back onto the original route, avoided the cones, and… got stuck. We pressed the “drop off” button, which accidentally connected us to support, so we quickly explained the situation and got out. To be fair to the Waymo, we saw several other human drivers go down the same coned-off path, only to get stuck and have to turn around, though they had a much easier time doing three-point turns than our car did.

We stood around waiting and talking to some onlookers who were quite amused at the sight of a driverless taxi. Eventually, either through contact from “the team” or because it got spooked by a wheelchair-accessible van that hopped the curb to get around the stuck Waymo, our car backed up, realized it could make the turn, and went along its way.
Speaking of onlookers, throughout the ride, our car was a matter of public interest to everyone around. It was interesting witnessing the mix of reactions – surprise, joy, bemusement, annoyance, and so on. And it made for an easy conversation piece – we could roll down the window and talk to pedestrians waiting at a light, or talk to anyone nearby after being dropped off, because everyone was interested in seeing it (and several took photos/video as well).
Our next leg back was, in comparison, relatively tame. Other than once again having to adjust the pickup location – the car thought it could pick us up in the busy intersection in front of Santa Monica Pier and right at the edge of the coverage area, and we decided to take it easy on the car and walk a block down, near where the car got stuck before – there was a lot less chaos on the way back.
And by “a lot less chaos” I mean only one car blatantly ran a red light directly in front of us. Our car told us it was “slowing down for vehicle on the left” when this happened, but then continued on as the car cleared the intersection, and when it noticed the cars behind it were thankfully not running the same red light.

Then, with little else eventful beyond waiting for a passing train and finding our way to a nice wide and empty street to carefully creep up to a once-again-quite-cautious dropoff, our driverless taxi day was over and we had to go back to using our hands and feet like chumps again.
Electrek’s Take
In terms of my autonomous drive experience, I’ve spent a good amount of time driving Teslas on Autopilot and FSD and in various other manufacturers’ Level 2 systems, have driven Mercedes’ Level 3 Drive Pilot system on Santa Monica freeways (but not surface streets – it only works on freeways), and ridden in another trial geofenced Level 4 system with a backup driver and engineer in the car.
So this is the “most autonomous” drive I’ve taken yet, my first truly driverless taxi ride, with nobody watching over the car. Same goes for my co-passenger, whose experience was previously limited to level 1-2 systems.
In the end, despite the several bizarre situations we encountered, we came out impressed at the capability of the system to handle all of them – in some way or another.
While sometimes the decisions were a little hesitant, or late, or the car got paralyzed with indecision, at no point did it actually feel like a danger. Was it an inconvenience, to other drivers? Yes, certainly a few times, primarily on side streets.
But more importantly, was it a problem for pedestrians or other road users? In our limited (but chaotic) testing, it didn’t seem so. While at one point we encountered pedestrians who were worried about crossing once they noticed the lack of driver, the car still seemed to show significant deference to them, probably moreso than the average driver does.
And that’s an important thing. Frankly, our roads need a realignment towards non-car users, so if this system nudges the line a little in that direction, that’s great.
Now – would I take it again, and could I rely on it, enough to get rid of a car or other ride-hailing apps (putting aside for the moment my refusal to use those apps for political reasons)? I’d take it again certainly, and would prefer it over other ride-hailing apps if it were cheaper.
If it were the same price, then my internal desire to chat with every ride-hailing driver would have to compete with my internal desire to try out new technology (and chat with random passersby who are excitedly filming my headless chariot). My decider would probably be whether there’s currently a COVID spike happening (having the car to oneself is nice, in this instance) – or, for people with other personal safety concerns or who have social anxiety, I could see the system, as it is, being a great boon for them.
And the fact that I’m sitting here balancing a driverless taxi relatively evenly against a professional human driver is telling. While it’s clearly not as good as a good driver (and not as confident as even an average one), it’s better than a bad, overly aggressive or distracted driver, and is much better than learning or unfamiliar drivers I’ve been with (for example, a European friend was terribly unconfident at driving when he first moved to California, and I would pick Waymo over how he used to drive – he’s better now, thankfully).
But as for getting rid of a car? Here in SoCal, it’s hard not to own a car, but Waymo says that in other service areas some two-car families have gone down to being one-car families, knowing that Waymo could be relied upon as a backup.
With only one day of testing in a temporary service area, that overall reliability is not a question I can answer. We didn’t have long waits, but we were riding on a media preview weekend and weren’t on any particular schedule.
So it would probably be hard for a SoCal driver to eliminate a car completely from their life for now – especially given the limited coverage areas, but perhaps even if the area covered the entirety of the LA basin, due to the lack of other non-car transportation infrastructure here.
But in cities that are more walkable or which actually have other public transit methods available (*cough* thanks GM…), like San Francisco, I could certainly see Waymo as more than just a novelty, even with its current capabilities, and slot it in as another effective transportation method to be used routinely when situations call for it. Even above other ride-hailing apps. In fact, I know someone who has done this – he moved to SF, sold his Tesla, and is using Waymo as one of his essential transportation options, along with BART and Muni.
That replacing a human driver with a robot one is even a question at this point seems like a triumph for Waymo’s driverless taxi operation. Now, we just need to see if they can scale up with more testing, more cars, reasonable fare structures, more coverage areas, level 5… you know. Nothing much.
But hey, the finish line at least looks like it exists, right? Even if you need to squint a bit to see it. And that’s something.
(Over the course of this article I’ve included timestamped links to a 33 minute lightly-edited video of all the drives of the day, but if you want to watch the whole thing and scrub around for yourself, you can do so below or over on YouTube)
FTC: We use income earning auto affiliate links. More.